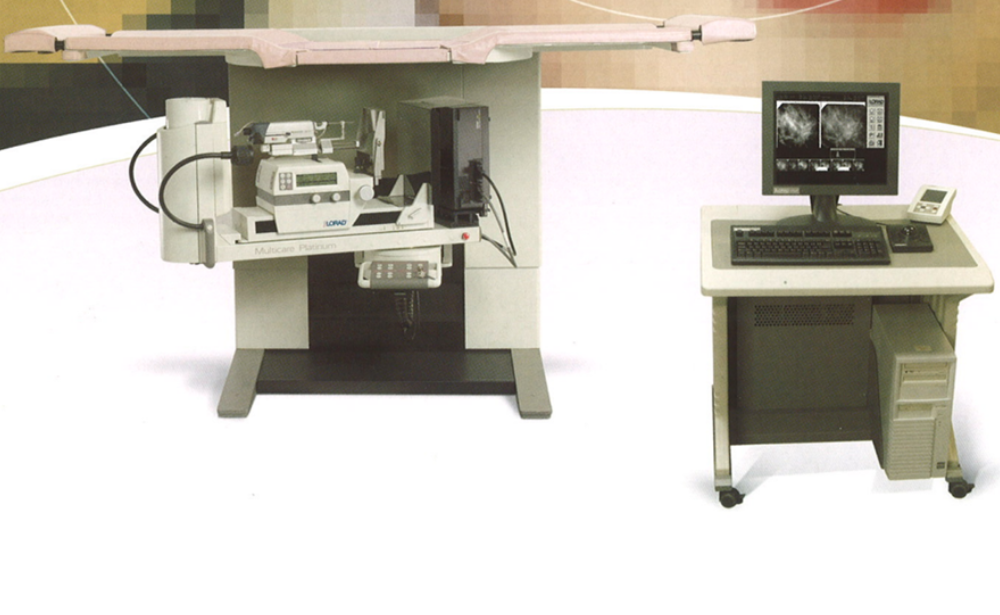
| MAMOTOMO | |
| 1.- Condiciones de operación generales | 1.1. intervalo de temperatura entre 15° y 25° |
| 1.2. Velocidad máxima de cambio de la temperatura de 10°C por hora | |
| 1.3. Intervalo de humedad relativa entre el 30% y el 75% | |
| 2.- Especificaciones eléctricas protección del sistema | 2.1. Sistema de alimentación ininterrumpida de 600 VA 450 W |
| 2.2. Tensión de entrada 100-120 VCA, 220-240 VCA | |
| 2.3. Promedio de corriente de alimentación en 24 horas menor a 5 A | |
| 2.4. Corriente de alimentación máxima de 4ª (65 A como máximo durante menos de 5 segundos) | |
| 2.5. Frecuencia 50/60 Hz | |
| 3.- Estación de trabajo de adquisición | 3.1. Tipo de CPU Intel basado en CPU Pentium |
| 3.2. Sin información de la memoria | |
| 3.3. Tamaño del disco duro adaptable | |
| 3.4. Windows 2000 | |
| 3.5. Ethernet | |
| 3.6. Altura máxima de 145 cm | |
| 3.7. Desplazamiento vertical ajustable | |
| 3.8. Almacenamiento CD/DVD | |
| 3.9. Con puertos USB | |
| 3.10. Búfer para imágenes locales en promedio 200,000 imágenes | |
| 3.11. Pantalla de flujo de trabajo de 17” | |
| 3.12. Pantalla de visualización de imágenes DICOM | |
| 4.- Especificaciones del Gantry de rayos X | 4.1. Mecanismo del Gantry |
| 4.1.1. Sin información del peso de Gantry | |
| 4.1.2. Peso del generador de 86 kg | |
| 4.1.3. Peso de la estación de trabajo 114.8 Kg | |
| 4.2. Plataforma de apoyo para las pacientes | |
| 4.2.1. Colocación bidireccional de las pacientes | |
| 4.2.2. Intervalo de altura motorizada de 86.4 a 145 cm | |
| 4.2.3. Peso límite de 136.1 kg | |
| 4.2.4. Iluminación de 2 lámparas de halógeno incluidas en el arco en c | |
| 4.3. Brazo en C | |
| 4.3.1. Brazo tubular con rotación independiente, brazo de biopsia y mecanismo de detección | |
| 4.3.2. Abordaje lateral de la aguja integrado en el brazo de la biopsia | |
| 4.3.3. Rotación del brazo de 180° | |
| 4.3.4 SID de 88 cm | |
| 4.4. Compresión de la mama | |
| 4.4.1 Precompresión motorizada | |
| 4.4.2. Compresión manual con rueda de giro manual | |
| 4.4.3. Liberación motorizada | |
| 4.4.4. Controles por Keypad o por pedal | |
| 4.4.5. Sin información de fuerza de compresión manual | |
| 4.4.6. Fuerza de compresión motorizada de 30 lb máximo | |
| 4.4.7. Palas de biopsia, palas de acero inoxidable de 10 y 17 cm, pala de ultrasonidos en forma de T y pala perforada | |
| 5.- Receptor de imágenes digitales | 5.1. Tecnología |
| 5.1.1. Tipo de captura CCD (sensor acoplado por alta eficiencia de lentes) | |
| 5.1.2. Pantalla de fosforo | |
| 5.1.3. Tamaño del receptor de la imagen 32.1 X 27.9 cm | |
| 5.1.4. Tamaño del campo de visión 6.8 X 6.8 cm | |
| 5.1.5. Tamaño del pixel 24 X 24 µm | |
| 5.1.6. Limite de resolución espacial 9 a 10 lp/mm | |
| 5.1.7. Rango dinámico 84:1 | |
| 5.1.8. Profundidad de imagen obtenida 14 Bits | |
| 5.1.9. Sin información de ampliación geométrica | |
| 5.2. Entorno de almacenamiento | |
| 5.2.1. Temperatura de -9.4° a 70° C | |
| 5.2.2. Rango de humedad relativa de 0 a 95% sin condensación | |
| 6.-Subsistema de rayos X | 6.1. Generador independiente |
| 6.1.1. De alta frecuencia, de tipo inversos y potencia constante | |
| 6.1.2. Potencia nominal de 2.38 kW máximo con un enfoque a 34 kV | |
| 6.1.3. Sin información de capacidad de potencia eléctrica | |
| 6.1.4. De 22 a 34 kV | |
| 6.1.5. Rango de mAs de 3 a 400 mAs | |
| 6.1.6. Rango de hasta 70 mA | |
| 6.2. Tubo de rayos X | |
| 6.2.1. Material de ánodo rotatorio de molibdeno | |
| 6.2.2. Tamaño del punto 0.25 mm | |
| 6.2.3. Filtro de 30 µm de molibdeno | |
| 6.2.4. Puerto de Berilio | |
| 7.- Guiado para biopsia | 7.1. Especificaciones |
| 7.1.1. Guiado de la aguja por coordenadas cartesianas | |
| 7.1.2. Precisión de 1mm | |
| 7.1.3. Angulo de Esterotaxia de ±15° | |
| 7.1.4. Movimientos motorizados en 2 ejes y manual en eje Z | |
| 7.1.5. Rango de movimiento Horizontal de -3.5 a +3.5 cm, vertical de 0 a 5.0 cm y aguja de 0 a 10 cm | |
| 7.1.6. Modulo de control de biopsia pantalla con resolución de 1024 X 600 pixeles | |
| 8.- Estación de adquisición | 8.1. Conexiones |
| 8.2. Servicios DICOM de impresión, consulta, almacenamiento y lista de trabajo | |
| 8.3. Perfil de integración, configurando el protocolo de adquisición, consulta general de la lista de trabajo, lista de trabajo por pacientes | |
| 8.4. Sin perfil de conciliación de la información de paciente | |
| 8.5. Sin perfil de integración para acceso a la información radiológica | |
| 8.6. Sin perfil de integración para los datos portátiles en la adquisición de imágenes | |
| 9.-Dimensiones de la estación de trabajo de adquisición | 9.1. Gantry/patient dimensiones de plataforma |
| 9.1.1. Altura 145 cm | |
| 9.1.2. largo 215 cm | |
| 9.1.3. Ancho 156 cm | |
| 9.1.4 Ancho total 161 cm | |
| 9.1.5. Sin información de peso total | |
| 9.2. Dimensiones del generador | |
| 9.2.1. Alto 64 cm | |
| 9.2.2 Largo de 51 cm | |
| 9.2.3. Ancho 38 cm | |
| 9.2.4. Peso total 86 kg | |
| 9.3. Dimensiones de la estación de trabajo de adquisición | |
| 9.3.1. Alto 96.5 cm | |
| 9.3.2. Rango de alto de 96.5 a 157.5 cm | |
| 9.3.3. Rango de altura 61 cm | |
| 9.3.4. Peso total 114.8 kg |
